Robot evasor de obstáculos con HC‑SR04 y DRV8833 Y NANO V3— Tutorial paso a paso Deja un comentario
Este proyecto muestra cómo construir un robot evasor de obstáculos usando un sensor ultrasónico HC‑SR04, un driver de motores DRV8833 y una placa Arduino. El comportamiento del robot es sencillo y robusto: avanza en micro‑bursts, detecta obstáculos, retrocede, gira (alternando derecha/izquierda) y continúa.
Materiales necesarios
- 1 × Arduino (Uno, Nano o similar)
- 1 × Sensor ultrasónico HC‑SR04
- 1 × Driver de motor DC (ej. DRV8833 o similar)
- 2 × Motores DC con ruedas (tensión según motores; 3–7 V típico)
- 1 × Chasis para robots (o base casera)
- 1 × Batería o pack de baterías para los motores (asegúrate de la tensión adecuada)
- Cables macho‑macho / macho‑hembra
- Protoboard (opcional)
- Tornillos, soportes y herramientas básicas
- Ordenador con el IDE de Arduino para subir el código
Nota: alimenta la placa Arduino y los motores de manera adecuada. Es habitual usar una fuente separada para los motores (battery pack) y compartir la masa (GND) con el Arduino.
Mapeo de pines y recomendaciones
El código de ejemplo usa estos pines (puedes adaptarlos según tu placa):
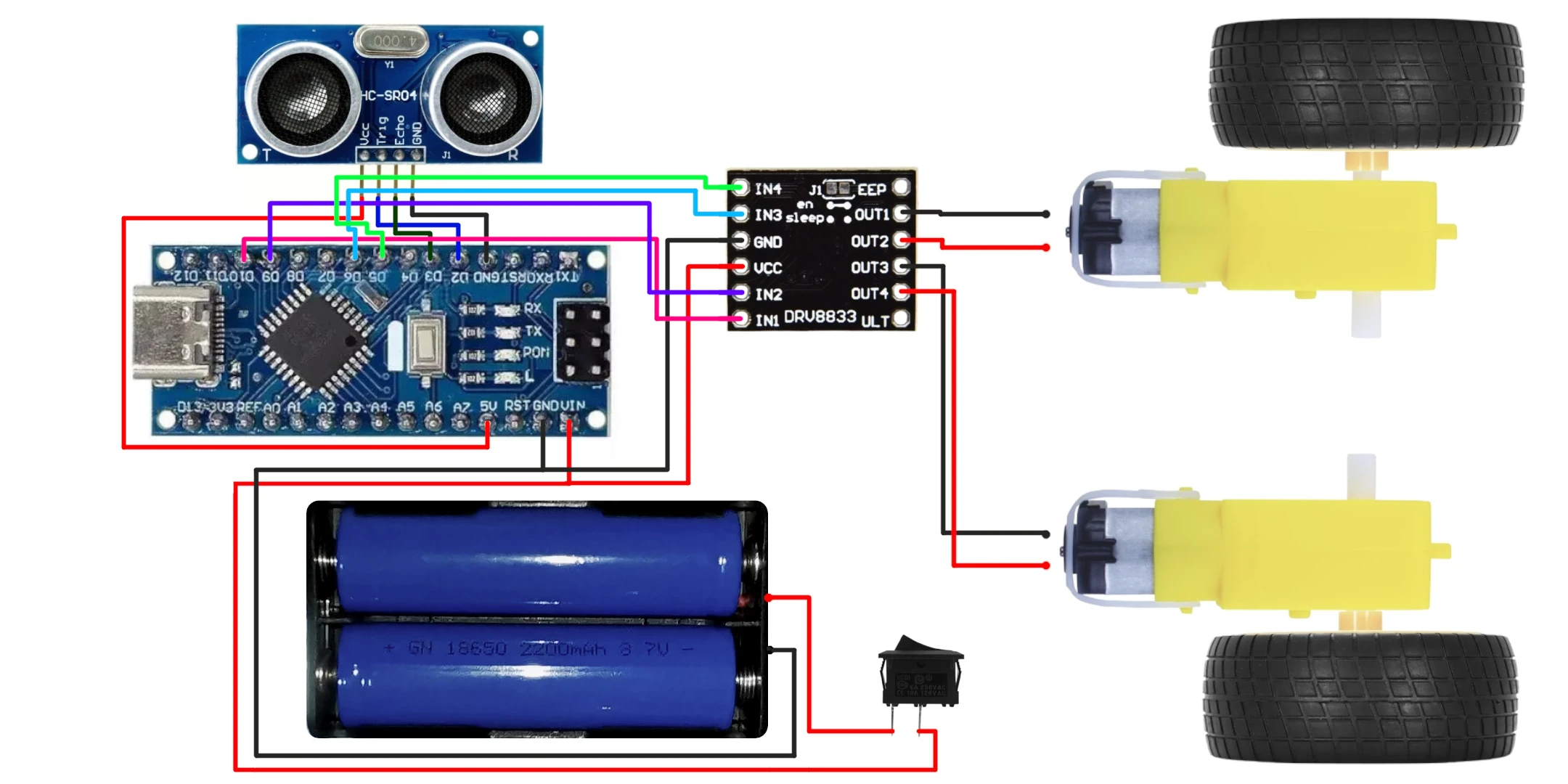
trigPin→ D2 (Trigger del HC‑SR04)echoPin→ D3 (Echo del HC‑SR04)motorA1→ D10motorA2→ D9motorB1→ D6motorB2→ D5
Advertencia importante (PWM): el código usa analogWrite() para controlar velocidad. En una Arduino Uno analogWrite() solo funciona en pines PWM: 3, 5, 6, 9, 10, 11. considera usar alguno de esos pines sino usas el mapeo original.
Conexiones (esquema general)
- HC‑SR04
- VCC → 5V (o 3.3V según tu placa/sensor)
- GND → GND común
- TRIG →
trigPin(D2) - ECHO →
echoPin(D3)
- DRV8833 (o driver equivalente)
- IN1 (motor A) →
motorA1(D10) - IN2 (motor A) →
motorA2(D9) - IN3 (motor B) →
motorB1(D6) - IN4 (motor B) →
motorB2(D5) - VMotor → alimentación de motores (batería)
- GND → GND común con Arduino
- IN1 (motor A) →
- Motores
- Motor A → salidas motor A del driver
- Motor B → salidas motor B del driver
Asegúrate de que todas las masas estén conectadas (Arduino, driver y batería). Si el driver tiene pines EN / nSLEEP / FAULT, revisa la hoja de datos del módulo y conéctalos según las indicaciones (por ejemplo poner nSLEEP a HIGH si es necesario).
HC-SR04 PinOut

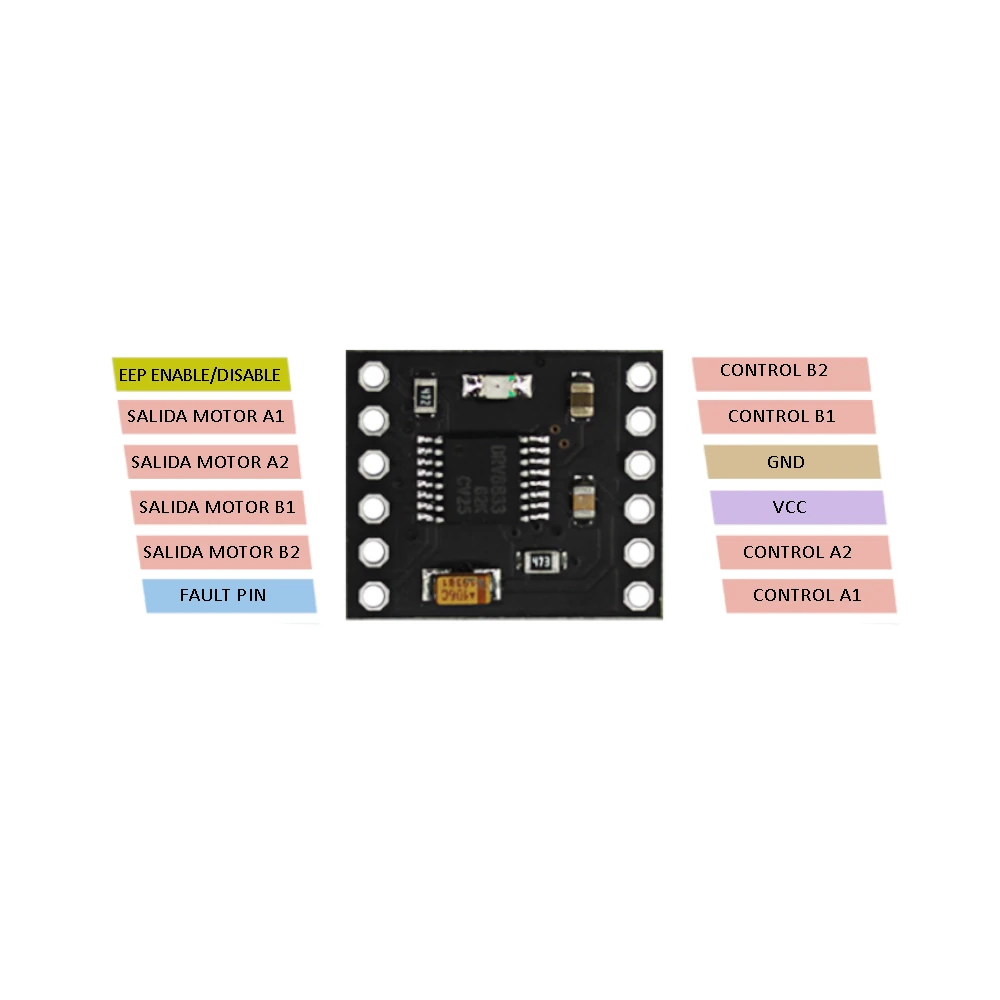
DRV8833 PinOut
Conexiones Necesarias Para Armar el Robot Evasor de Objetos
Montaje paso a paso
- Fija los motores al chasis y coloca las ruedas.
- Monta el driver de motores en el chasis o protoboard.
- Conecta cada motor a las salidas del driver (observa polaridad para probar dirección).
- Coloca el HC‑SR04 en la parte frontal del chasis (alineado horizontalmente al suelo).
- Conecta los pines de control entre Arduino y driver / sensor siguiendo el mapeo.
- Conecta la alimentación de los motores a la entrada VM del driver (cuidado con la polaridad). No olvides compartir GND.
- Conecta Arduino al ordenador y sube el sketch (código) que aparece al final de la entrada.
- Quita las hélices/ruedas del suelo y prueba en el aire o con el robot elevado la primera vez para verificar direcciones de motor. Si un motor gira al revés, invierte sus cables en el driver o intercambia INx/INy.
Pruebas y puesta en marcha
- Antes de conectar la batería, revisa conexiones y masas.
- Sube el código y observa el monitor serie (si añadieras
Serial.printpara debug) o prueba con el robot sobre una superficie segura. - Si los motores no responden, verifica que los pines PWM estén bien asignados.
- Ajusta
motorSpeeden el código si necesitas más o menos potencia (0–255). - Si las lecturas del HC‑SR04 son erráticas, comprueba: alimentación, cables y que el sensor no reciba reflejos laterales.
Explicación del código (líneas clave)
A continuación se explica el comportamiento y las funciones más importantes del sketch.
Pines y configuración inicial
- Se definen pines para el
trigyechodel sensor ultrasónico y cuatro pines de control para los dos motores. - Variables de configuración:
obstacleDistance— distancia umbral en cm a la que se considera que hay un obstáculo.motorSpeed— velocidad usada enanalogWrite()(0–255).backTime,turnTime,stepDelay,forwardStep— tiempos en milisegundos que controlan las rutinas de movimiento.
readDistance()
Esta función genera el pulso de trigger (10 µs) y mide la duración del pulso en echo con pulseIn(). La fórmula usada convierte la duración en centímetros:
long d = duration * 0.034 / 2;
durationestá en microsegundos (µs).- 0.034 es una aproximación de la velocidad del sonido en cm/µs (≈ 0.0343 cm/µs). Se divide entre 2 porque el pulso recorre la distancia de ida y vuelta.
La función también protege contra lecturas erróneas (si d == 0 o d > 300 se fija en 300 cm).
Helpers de motor
Hay funciones cortas que abstraen el movimiento:
motorForward()— avanza usandoanalogWriteen los pines “hacia adelante”.motorBackward()— invierte las señales para retroceder.motorLeft()/motorRight()— hacen un giro diferencial (un motor adelante, otro atrás) para girar sobre sí.motorStop()— pone todo a LOW y detiene los motores.
Importante: estas funciones asumen que al aplicar
analogWrite(pin, motorSpeed)el pin es PWM. Si tu pin no es PWM, la velocidad no variará correctamente.
loop() — lógica principal
- El robot hace pausas micro (
stepDelay) y lee la distancia antes de moverse. - Si detecta un obstáculo (
distance < obstacleDistance) hace:- Retroceso breve (
backTime) comprobando si el obstáculo se despeja. - Giro por
turnTime(la dirección del giro alterna entre derecha/izquierda usandoturnRightNext). Durante el giro también se vuelve a comprobar la distancia para salir antes si está despejado. - Avanza un breve tramo tras el giro (
forwardStep). - Invierte la variable
turnRightNextpara alternar la próxima vez.
- Retroceso breve (
- Si no hay obstáculo, avanza en micro‑bursts controlados por
forwardStepystepDelay, leyendo la distancia en cada paso.
Este enfoque (micro‑bursts + comprobaciones continuas) da un movimiento más controlado y permite reaccionar rápidamente ante nuevos obstáculos.
Ajustes recomendados y consejos
- PWM y pines: asegúrate de usar pines PWM para
analogWrite. Si usas Arduino Uno, utiliza 3, 5, 6, 9, 10, 11. - Velocidad:
motorSpeedadmite 0–255. Empieza con valores bajos (100–160) y sube según convenga. - Sensibilidad: ajusta
obstacleDistancepara que el robot tenga suficiente tiempo para reaccionar según la velocidad de tus motores. - Alimentación: usa una batería con suficiente corriente. Los drivers pequeños pueden calentarse; evita sobrecargas.
- Filtro de lecturas: si el HC‑SR04 da lecturas inestables, puedes implementar un filtro (media móvil) o descartar valores extremos antes de tomar decisiones.
